
KMP 算法(Knuth-Morris-Pratt 算法)是一个著名的字符串匹配算法,效率很高,也有点复杂。
先在开头约定,
本文用 pat 表示模式串,长度为 M,
txt 表示文本串,长度为 N。
KMP 算法是在 txt 中查找子串 pat,
如果存在,返回这个子串的起始索引,否则返回 -1。
为什么我认为 KMP 算法就是个动态规划问题呢,等会再解释。
读者见过的 KMP 算法应该是,一波诡异的操作处理 pat 后形成一个一维的数组 next,然后根据这个数组经过又一波复杂操作去匹配 txt。
时间复杂度 O(N),空间复杂度 O(M)。
其实它这个 next 数组就相当于 dp 数组,其中元素的含义跟 pat 的前缀和后缀有关,判定规则比较复杂,不好理解。
本文则用一个二维的 dp 数组(但空间复杂度还是 O(M)),重新定义其中元素的含义,使得代码长度大大减少,可解释性大大提高。
一、KMP 算法概述
首先还是简单介绍一下 KMP 算法和暴力匹配算法的不同在哪里,难点在哪里,和动态规划有啥关系。
暴力的字符串匹配算法很容易写,看一下它的运行逻辑:
对于暴力算法,如果出现不匹配字符,同时回退 txt 和 pat 的指针,
嵌套 for 循环,时间复杂度 O(MN),空间复杂度O(1)。
最主要的问题是,如果字符串中重复的字符比较多,该算法就显得很蠢。
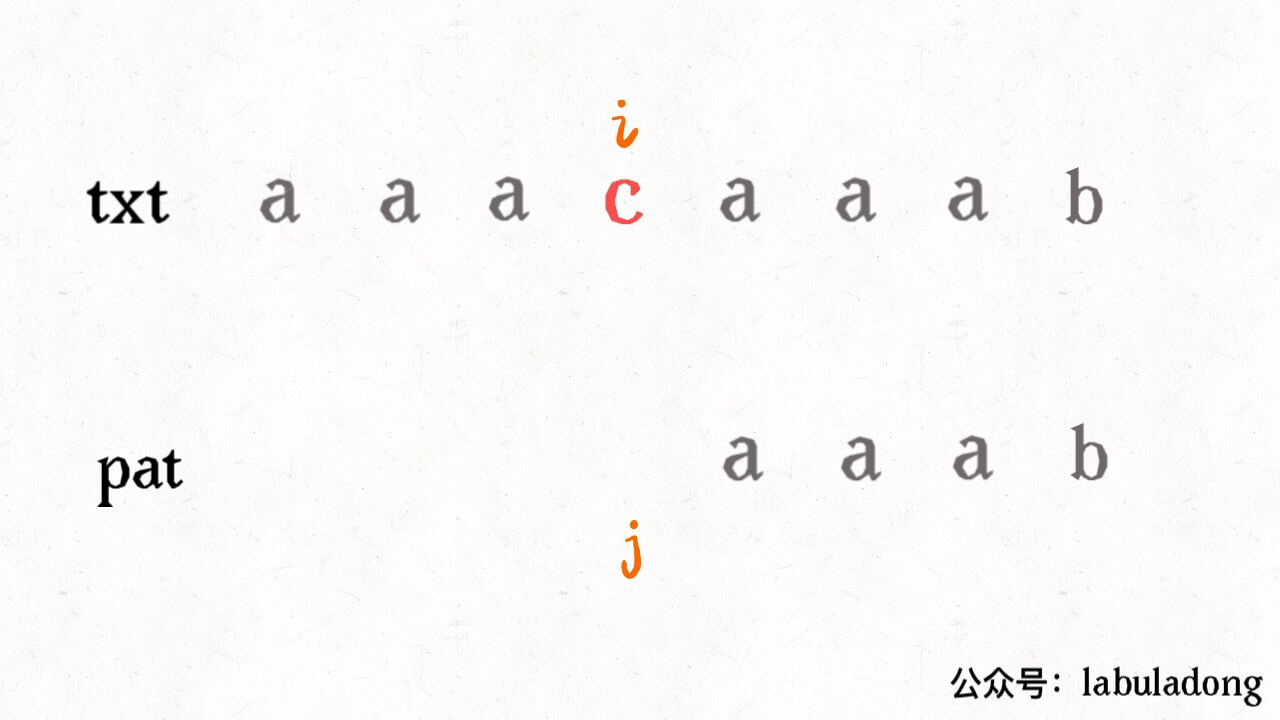
如图所示: txt = “aaacaaab”, pat = “aaab”;
很明显,pat 中根本没有字符 c,根本没必要回退指针 i,
暴力解法明显多做了很多不必要的操作。
KMP 算法的不同之处在于,它会花费空间来记录一些信息,在上述情况中就会显得很聪明
如图所示:

再比如类似的 txt = “aaaaaaab”, pat = “aaab”;
暴力解法还会和上面那个例子一样蠢蠢地回退指针 i,
而 KMP 算法又会耍小聪明:

因为 KMP 算法知道字符 b 之前的字符 a 都是匹配的,
所以每次只需要比较字符 b 是否被匹配就行了。
KMP 算法永不回退 txt 的指针 i,不走回头路(不会重复扫描 txt),
而是借助 dp 数组中储存的信息把 pat 移到正确的位置继续匹配,
时间复杂度只需 O(N),用空间换时间,所以我认为它是一种动态规划算法。
KMP 算法的难点在于,如何计算 dp 数组中的信息?
如何根据这些信息正确地移动 pat 的指针?
这个就需要确定有限状态自动机来辅助了。
还有一点需要明确的是:计算这个 dp 数组,只和 pat 串有关。
意思是说,只要给我个 pat,我就能通过这个模式串计算出 dp 数组,
然后你可以给我不同的 txt,我都不怕,利用这个 dp 数组我都能在 O(N) 时间完成字符串匹配。
具体来说,比如上文举的两个例子:
我们的 txt 不同,但是 pat 是一样的,所以 KMP 算法使用的 dp 数组是同一个。
只不过对于 txt1 的下面这个即将出现的未匹配情况:

dp 数组指示 pat 这样移动:
PS:这个j 不要理解为索引,它的含义更准确地说应该是状态(state),所以它会出现这个奇怪的位置,后文会详述。
而对于 txt2 的下面这个即将出现的未匹配情况:

dp 数组指示 pat 这样移动:

明白了 dp 数组只和 pat 有关,那么我们这样设计 KMP 算法就会比较漂亮:
这样,当我们需要用同一 pat 去匹配不同 txt 时,就不需要浪费时间构造 dp 数组了:
二、状态机概述
为什么说 KMP 算法和状态机有关呢?
是这样的,我们可以认为 pat 的匹配就是状态的转移。
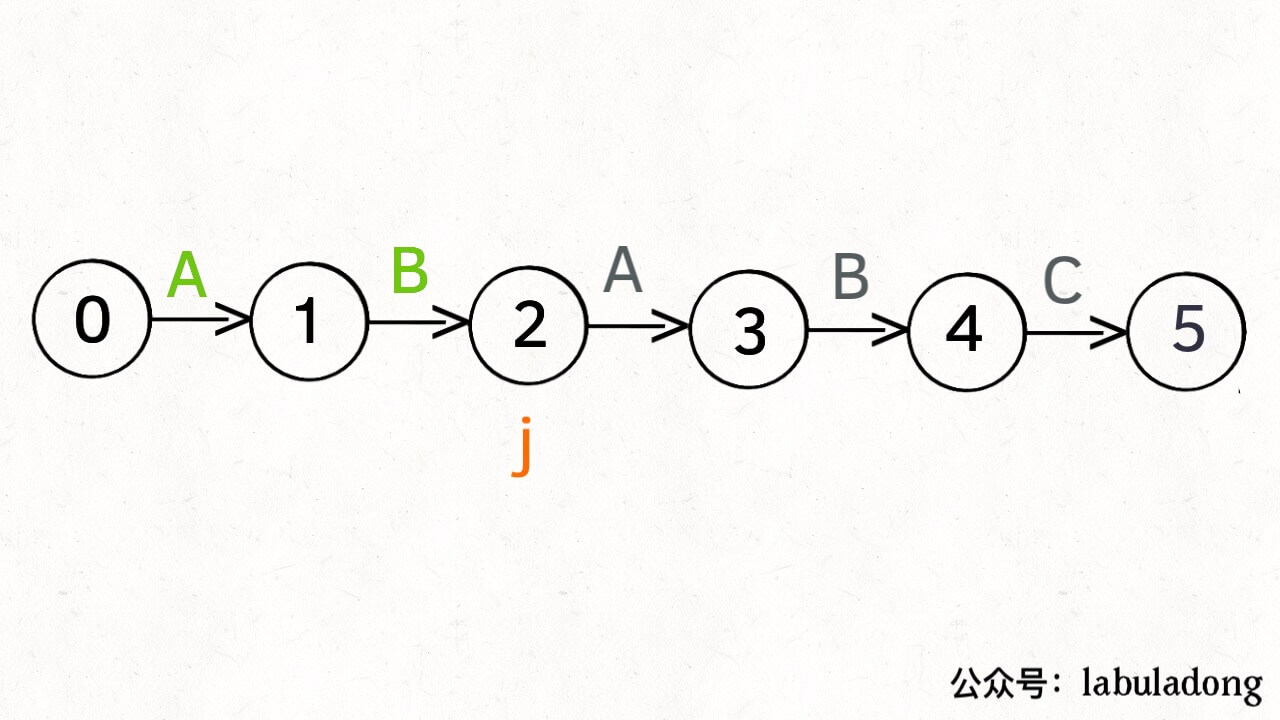
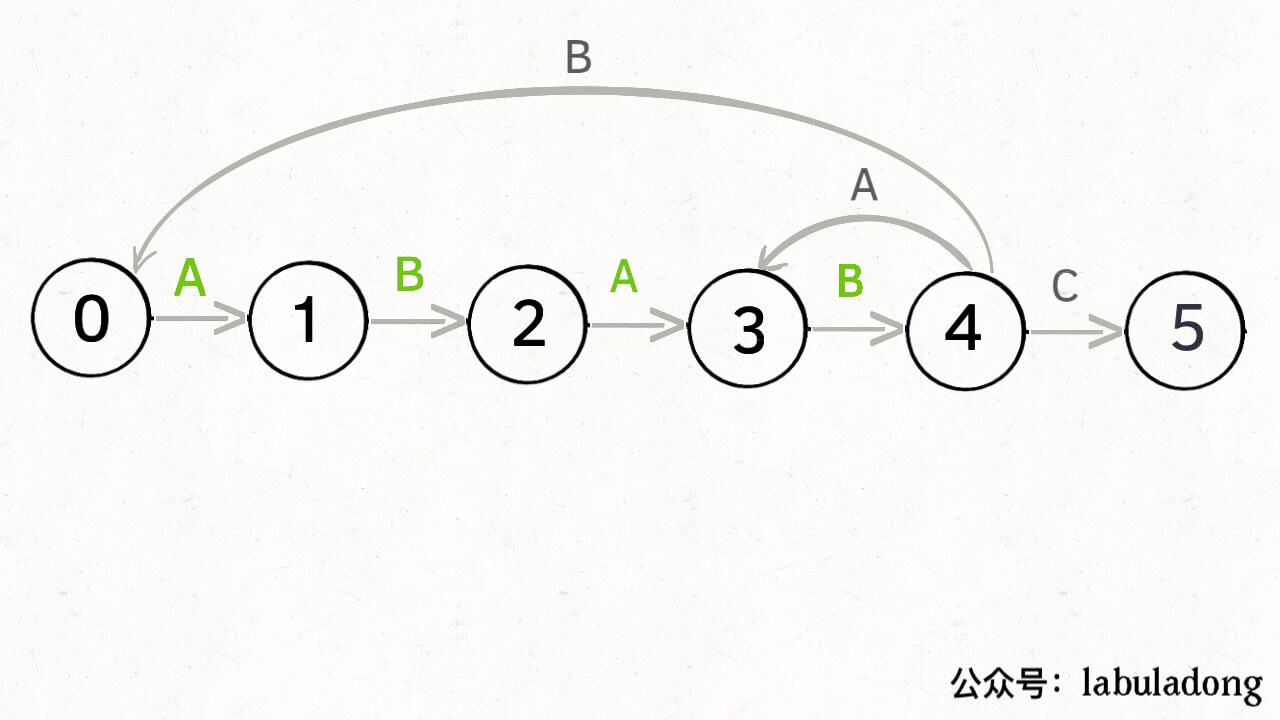
比如当 pat = “ABABC”:

如上图,圆圈内的数字就是状态,状态 0 是起始状态,状态 5(pat.length)是终止状态。
开始匹配时 pat 处于起始状态,一旦转移到终止状态,就说明在 txt 中找到了 pat。
比如说当前处于状态 2,就说明字符 “AB” 被匹配:
另外,处于不同状态时,pat 状态转移的行为也不同。
比如说假设现在匹配到了状态 4,
如果遇到字符 A 就应该转移到状态 3,
遇到字符 C 就应该转移到状态 5,
如果遇到字符 B 就应该转移到状态 0:
具体什么意思呢,我们来一个个举例看看。
用变量 j 表示指向当前状态的指针,当前 pat 匹配到了状态 4:
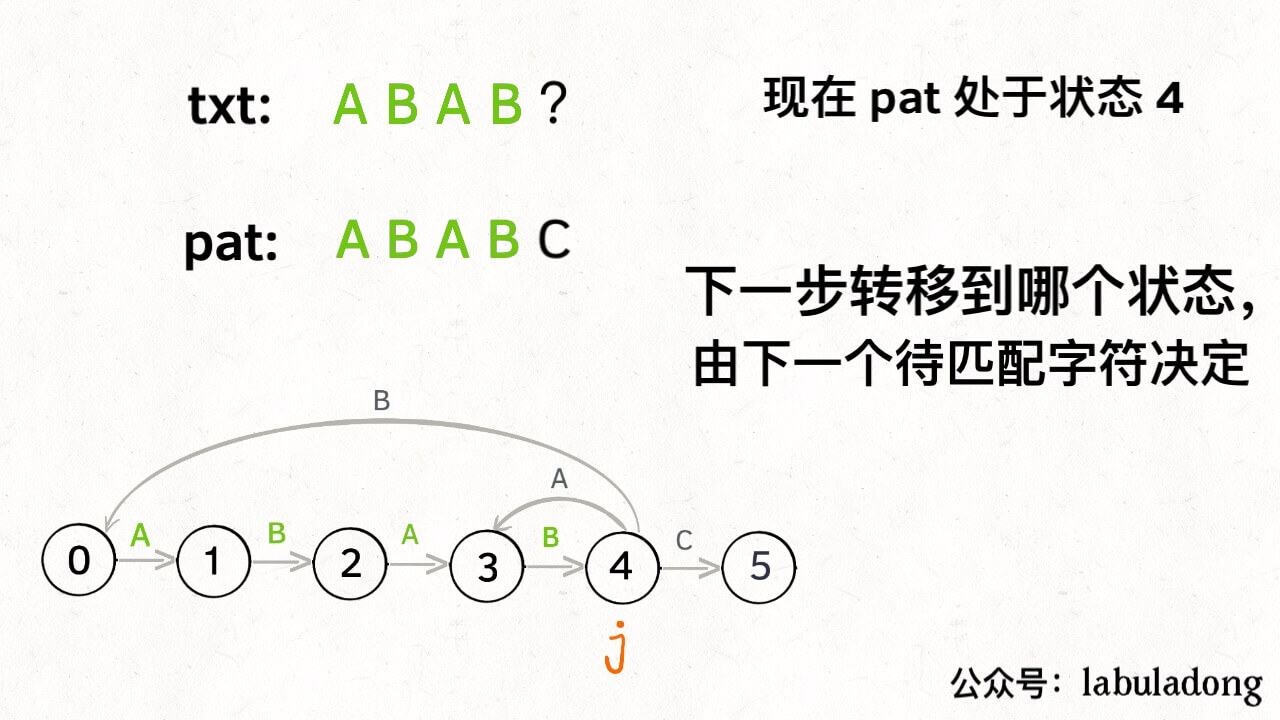
如果遇到了字符 “A”,根据箭头指示,转移到状态 3 是最聪明的:

如果遇到了字符 “B”,根据箭头指示,只能转移到状态 0(一夜回到解放前):

如果遇到了字符 “C”,根据箭头指示,应该转移到终止状态 5,这也就意味着匹配完成:

当然了,还可能遇到其他字符,比如 Z,但是显然应该转移到起始状态 0,因为 pat 中根本都没有字符 Z:

这里为了清晰起见,我们画状态图时就把其他字符转移到状态 0 的箭头省略,只画 pat 中出现的字符的状态转移:
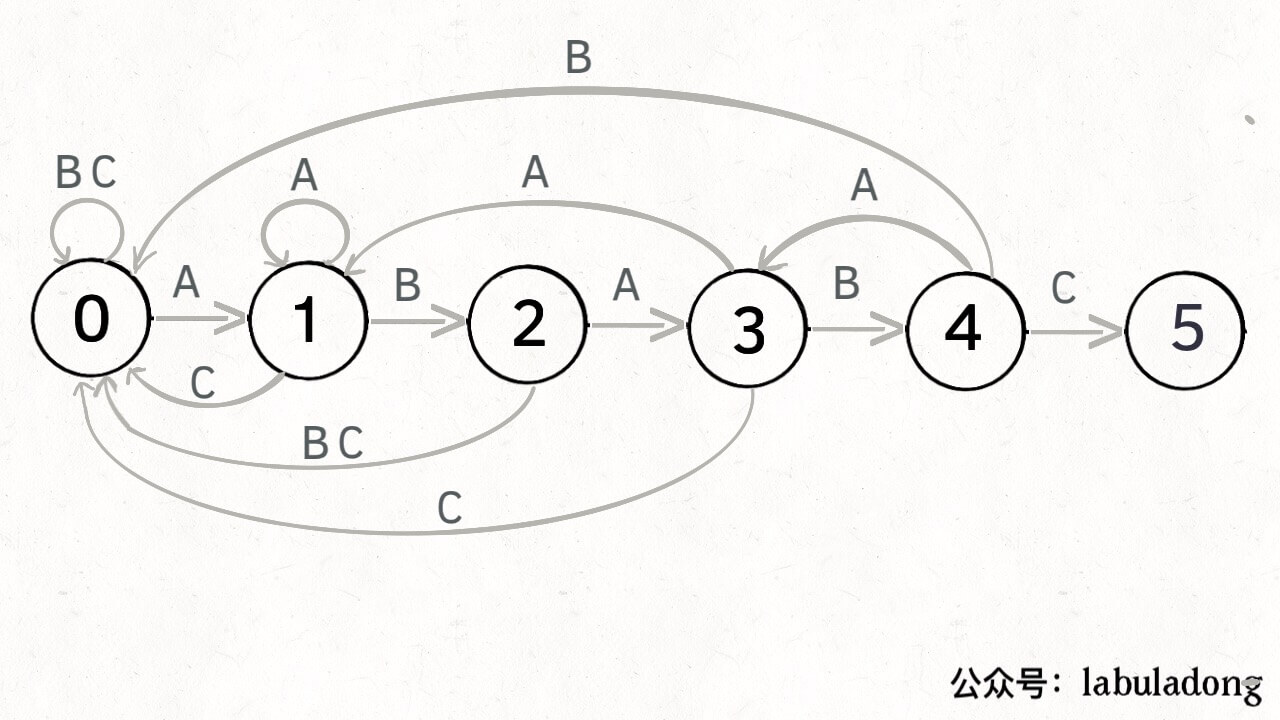
KMP 算法最关键的步骤就是构造这个状态转移图。
要确定状态转移的行为,得明确两个变量,
一个是当前的匹配状态,
另一个是遇到的字符;
确定了这两个变量后,就可以知道这个情况下应该转移到哪个状态。
下面看一下 KMP 算法根据这幅状态转移图匹配字符串 txt 的过程:
请记住这个 GIF 的匹配过程,这就是 KMP 算法的核心逻辑!
为了描述状态转移图,我们定义一个二维 dp 数组,它的含义如下:
根据我们这个 dp 数组的定义和刚才状态转移的过程,
我们可以先写出 KMP 算法的 search 函数代码:
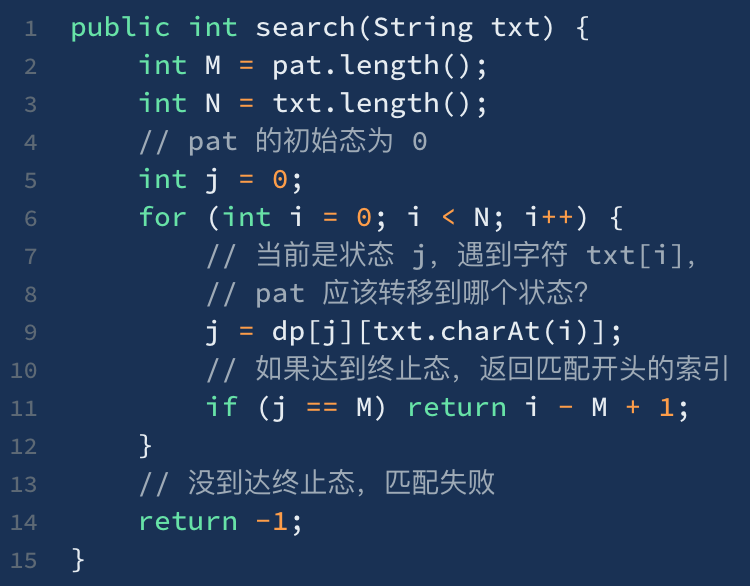
到这里,应该还是很好理解的吧,dp 数组就是我们刚才画的那幅状态转移图,
如果不清楚的话回去看下 GIF 的算法演进过程。
下面讲解:如何通过 pat 构建这个 dp 数组?
三、构建状态转移图
回想刚才说的:
要确定状态转移的行为,必须明确两个变量,
一个是当前的匹配状态,
另一个是遇到的字符,
而且我们已经根据这个逻辑确定了 dp 数组的含义,
那么构造 dp 数组的框架就是这样:
这个 next 状态应该怎么求呢?
显然,如果遇到的字符 c 和 pat[j] 匹配的话,状态就应该向前推进一个,
也就是说 next = j + 1,我们不妨称这种情况为状态推进:

如果字符 c 和 pat[j] 不匹配的话,状态就要回退(或者原地不动),
我们不妨称这种情况为状态重启:

那么,如何得知在哪个状态重启呢?
解答这个问题之前,我们再定义一个名字:
影子状态(我编的名字),用变量 X 表示。
所谓影子状态,就是和当前状态具有相同的前缀。
比如下面这种情况:
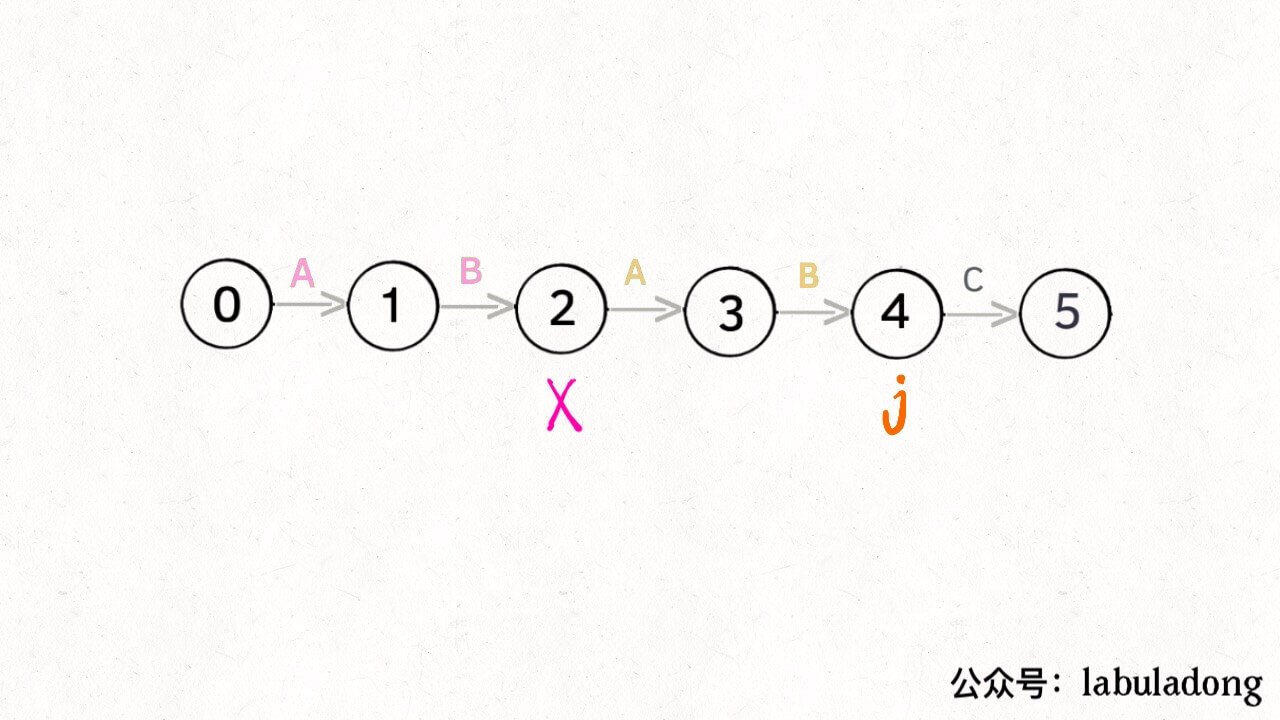
当前状态 j = 4,其影子状态为 X = 2,它们都有相同的前缀 “AB”。
因为状态 X 和状态 j 存在相同的前缀,
所以当状态 j 准备进行状态重启的时候(遇到的字符 c 和 pat[j] 不匹配),
可以通过 X 的状态转移图来获得最近的重启位置。
比如说刚才的情况,
如果状态 j 遇到一个字符 “A”,应该转移到哪里呢?
首先只有遇到 “C” 才能推进状态,遇到 “A” 显然只能进行状态重启。
状态 j 会把这个字符委托给状态 X 处理,也就是 dp[j]['A'] = dp[X]['A']:

为什么这样可以呢?
因为:既然 j 这边已经确定字符 “A” 无法推进状态,只能回退,
而且 KMP 就是要尽可能少的回退,以免多余的计算。
那么 j 就可以去问问和自己具有相同前缀的 X,
如果 X 遇见 “A” 可以进行「状态推进」,那就转移过去,因为这样回退最少。

当然,如果遇到的字符是 “B”,状态 X 也不能进行「状态推进」,只能回退,
j 只要跟着 X 指引的方向回退就行了:
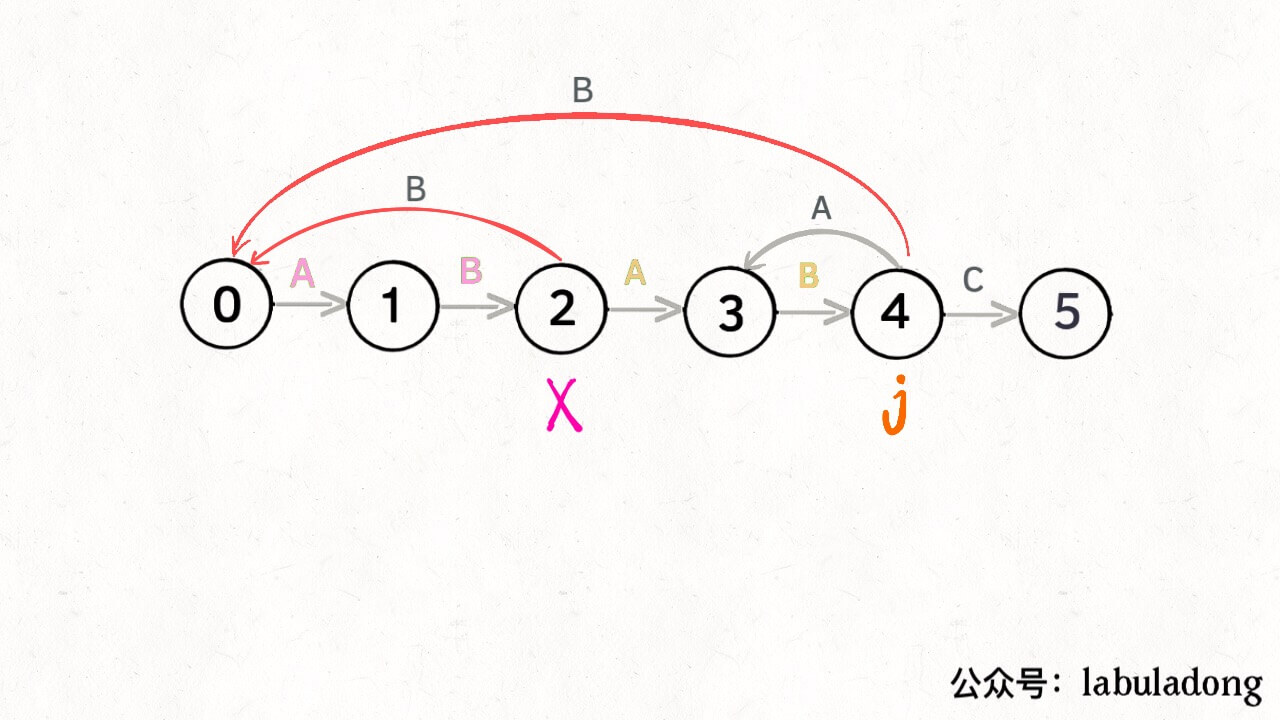
你也许会问,这个 X 怎么知道遇到字符 “B” 要回退到状态 0 呢?
因为 X 永远跟在 j 的身后,状态 X 如何转移,在之前就已经算出来了。
动态规划算法不就是利用过去的结果解决现在的问题吗?
这样,我们就细化一下刚才的框架代码:
四、代码实现
如果之前的内容你都能理解,恭喜你,现在就剩下一个问题:
影子状态 X 是如何得到的呢?
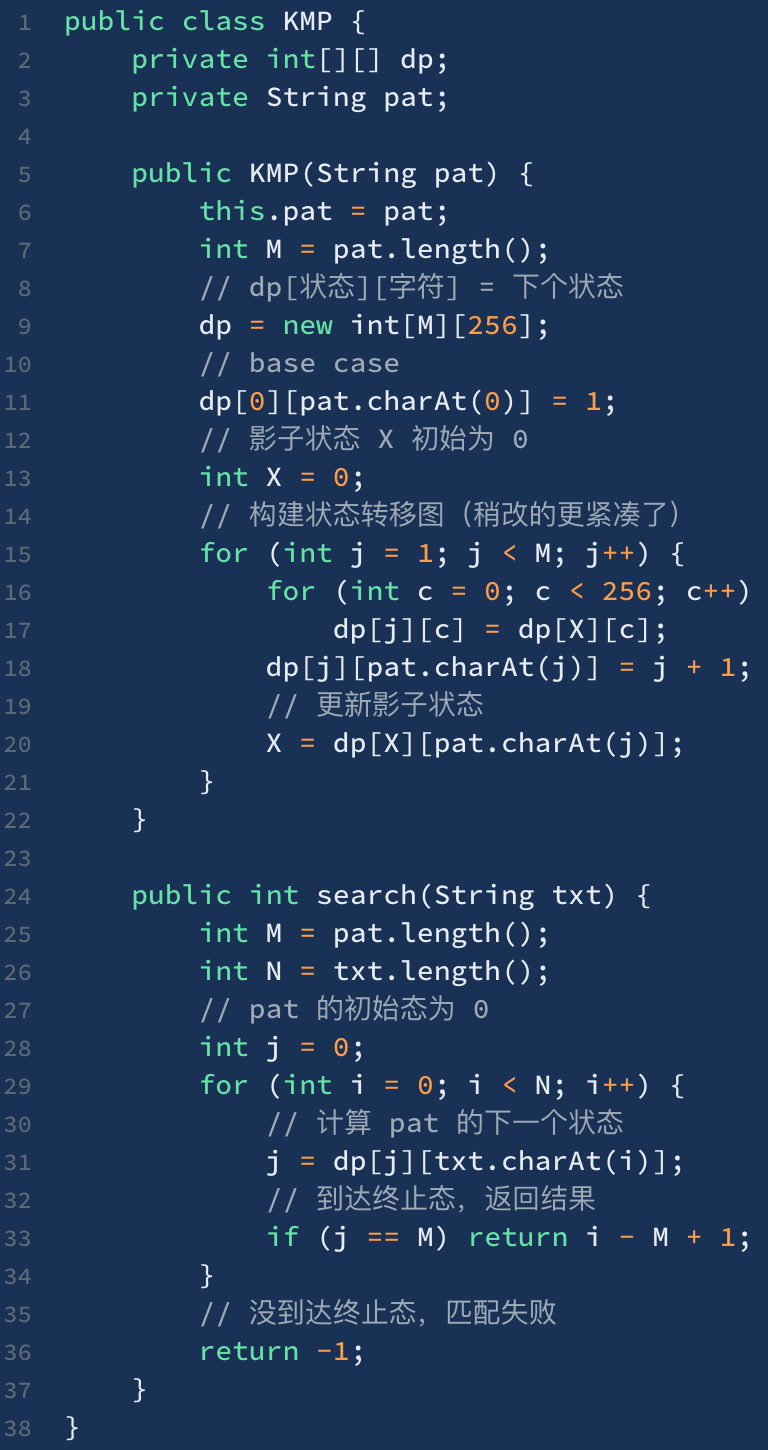
下面先直接看完整代码吧。
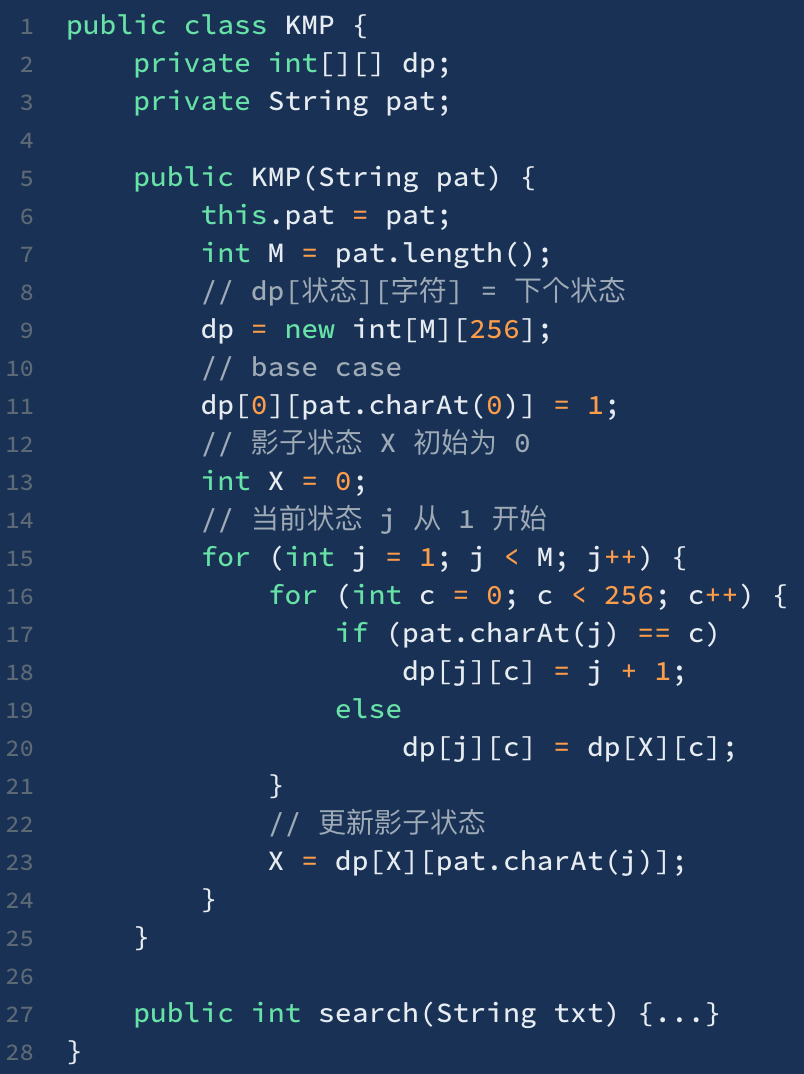
先解释一下这一行代码:
这行代码是 base case,
只有遇到 pat[0] 这个字符才能使状态从 0 转移到 1,
遇到其它字符的话还是停留在状态 0(Java 默认初始化数组全为 0)。
影子状态 X 是先初始化为 0,然后随着 j 的前进而不断更新的。
下面看看到底应该如何更新影子状态 X:
更新 X 其实和 search 函数中更新状态 j 的过程是非常相似的:
其中的原理非常微妙,
注意代码中 for 循环的变量初始值,可以这样理解:
后者是在 txt 中匹配 pat,
前者是在 pat 中匹配 pat[1..end],
状态 X 总是落后状态 j 一个状态,与 j 具有最长的相同前缀。
所以我把 X 比喻为影子状态,似乎也有一点贴切。
另外,构建 dp 数组是根据 base case dp[0][..] 向后推演。
这就是我认为 KMP 算法就是一种动态规划算法的原因。
下面来看一下状态转移图的完整构造过程,你就能理解状态 X 作用之精妙了:

至此,KMP 算法的核心终于写完啦啦啦啦!看下 KMP 算法的完整代码吧:
经过之前的详细举例讲解,你应该可以理解这段代码的含义了,
当然你也可以把 KMP 算法写成一个函数。
核心代码也就是两个函数中 for 循环的部分,数一下有超过十行吗?
五、最后总结
传统的 KMP 算法是使用一个一维数组 next 记录前缀信息,
而本文是使用一个二维数组 dp 以状态转移的角度解决字符匹配问题,
但是空间复杂度仍然是 O(256M) = O(M)。
在 pat 匹配 txt 的过程中,
只要明确了「当前处在哪个状态」和「遇到的字符是什么」这两个问题,
就可以确定应该转移到哪个状态(推进或回退)。
对于一个模式串 pat,其总共就有 M 个状态,
对于 ASCII 字符,总共不会超过 256 种。
所以我们就构造一个数组 dp[M][256] 来包含所有情况,并且明确 dp 数组的含义:
dp[j][c] = next 表示,当前是状态 j,遇到了字符 c,应该转移到状态 next。
明确了其含义,就可以很容易写出 search 函数的代码。
对于如何构建这个 dp 数组,
需要一个辅助状态 X,它永远比当前状态 j 落后一个状态,拥有和 j 最长的相同前缀,
我们给它起了个名字叫「影子状态」。
在构建当前状态 j 的转移方向时,
只有字符 pat[j] 才能使状态推进(dp[j][pat[j]] = j+1);
而对于其他字符只能进行状态回退,
应该去请教影子状态 X 应该回退到哪里(dp[j][other] = dp[X][other],其中 other 是除了 pat[j] 之外所有字符)。
对于影子状态 X,我们把它初始化为 0,并且随着 j 的前进进行更新,
更新的方式和 search 过程更新 j 的过程非常相似(X = dp[X][pat[j]])。